Movimiento de rotación
Rotación es el movimiento de cambio de orientación de un cuerpo o un sistema de referencia de forma que una línea (llamada eje de rotación) o un punto permanece fijo.La rotación de un cuerpo se representa mediante un operador que afecta a un conjunto de puntos o vectores. El movimiento rotatorio se representa mediante el vector velocidad angular
 ,
que es un vector de carácter deslizante y situado sobre el eje de
rotación. Cuando el eje pasa por el centro de masa o de gravedad se dice
que el cuerpo «gira sobre sí mismo».
,
que es un vector de carácter deslizante y situado sobre el eje de
rotación. Cuando el eje pasa por el centro de masa o de gravedad se dice
que el cuerpo «gira sobre sí mismo».En ingeniería mecánica, se llama revolución a una rotación completa de una pieza sobre su eje (como en la unidad de revoluciones por minuto), mientras que en astronomía se usa esta misma palabra para referirse al movimiento orbital de traslación de un cuerpo alrededor de otro (como los planetas alrededor del Sol).

Concepto de rotación y revolución
- La rotación de un cuerpo alrededor de un eje
(exterior o interior al cuerpo) corresponde a un movimiento en el que
los distintos puntos del cuerpo presentan velocidades que son
proporcionales a su distancia al eje. Los puntos del cuerpo situados
sobre el eje (en el caso de que éste sea interior al cuerpo) permanecen
en reposo.
- La orientación del cuerpo en el espacio cambia continuamente durante la traslación.
- Un ejemplo de rotación es el de la Tierra alrededor de su propio eje de rotación, con un período de rotación de un día sidéreo
- La revolución de una partícula o de un cuerpo extenso corresponde a un movimiento de traslación del cuerpo alrededor de otro.
- Un ejemplo de revolución es el de la Tierra alrededor del Sol, con un periodo de revolución de un año.

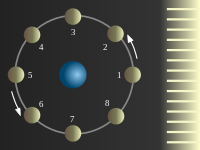
Las trayectorias recorridas por los distintos puntos del cuerpo pueden ser circunferencias, todas ellas del mismo radio (congruentes) aunque de distinto centro. Esta situación se presenta en una noria de feria de eje horizontal, como se muestra en la figura: la armadura de la noria gira en torno al eje (rotación), pero las barquillas suspendidas de dicha armadura, prescindiendo de pequeñas oscilaciones pendulares, experimentan una traslación con trayectorias circulares.

Movimiento rotatorio
Rotación infinitesimal
En una rotación en un ángulo infinitesimal δθ, se puede toma cos δθ ≈ 1 y sen δθ ≈ δθ, de modo que la expresión de la rotación plana pasa a ser:Si se componen dos rotaciones infinitesimales y, por ello, se descartan los términos de orden superior al primero, se comprueba que poseen la propiedad conmutativa, que no tienen las rotaciones tridimensionales finitas.

Matemáticamente el conjunto de las rotaciones infinitesimales en el espacio euclidiano forman el álgebra de Lie
 , asociada al grupo de Lie SO(3)
, asociada al grupo de Lie SO(3)Velocidad angular
Dado un sólido rígido que rota alrededor de un eje, la velocidad lineal v de una partícula se puede expresar a partir de la velocidad angular ω:Mientras que la aceleración a es:
Si el sólido rígido además de rotar alrededor de un eje tiene un movimiento adicional de traslación con velocidad instantánea V entonces las fórmulas anteriores deben substituirse por:



{kind=link}
{kind=link}
{kind=link}

No hay comentarios:
Publicar un comentario